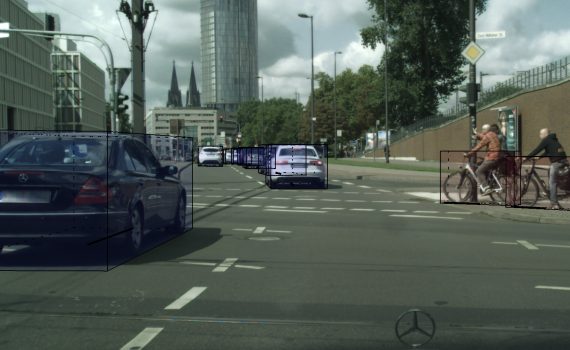
Cityscapes 3D is an extension of the original Cityscapes with 3D bounding box annotations for all types of vehicles as well as a benchmark for the 3D detection task. For more details please refer to our paper, presented at the CVPR 2020 Workshop on Scalability in Autonomous Driving. Today, we […]